PID 란
PID 제어기의 일반적인 구조

표준적인 형태의 PID 제어기는 아래의 식과 같이 세개의 항을 더하여 제어값(MV : Manipulated Variable)을 계산하도록 구성이 되어 있다.
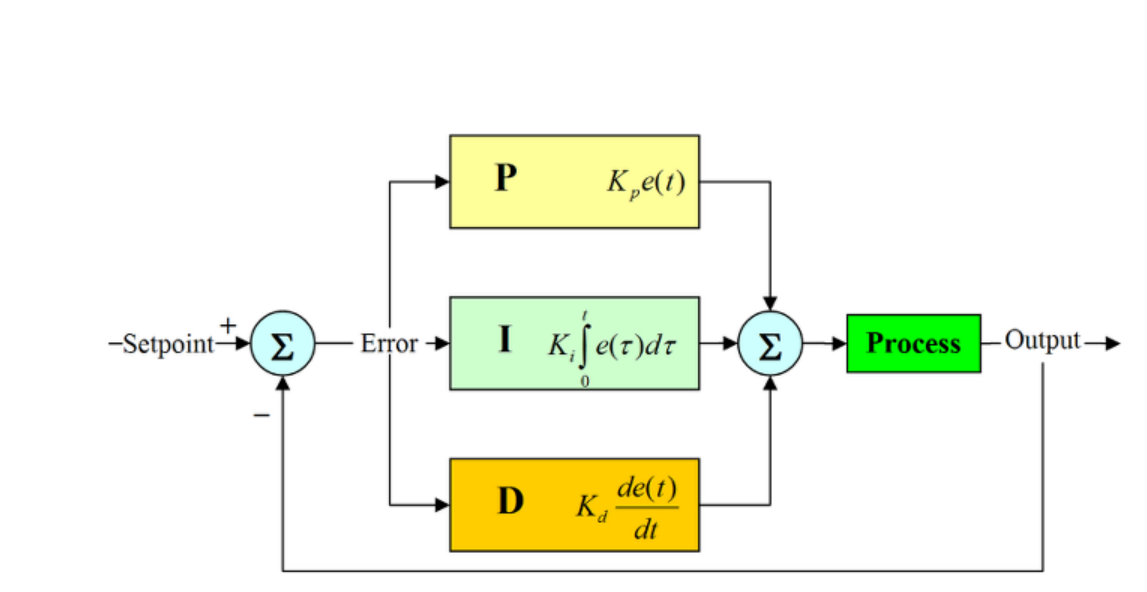
이 항들은 각각 오차값, 오차값의 적분(integral), 오차값의 미분(derivative)에 비례하기 때문에 비례-적분-미분 제어기 (Proportional–Integral–Derivative controller)라는 명칭을 가진다.
- 비례항 : 현재 상태에서의 오차값의 크기에 비례한 제어작용을 한다.
- 적분항 : 정상상태(steady-state) 오차를 없애는 작용을 한다.
- 미분항 : 출력값의 급격한 변화에 제동을 걸어 오버슛(overshoot)을 줄이고 안정성(stability)을 향상시킨다.
1) P 제어( 비례항)
현재 상태에서의 오차값의 크기에 비례한 제어작용을 한다.

초기 상태에서 비례항을 적용한 그래프

Kp 가 높을 떄 : setpoint는 빨리 도달하지만 전제척으로 오차가 크고 시스템이 불안정하다.
2) I 제어( 적분항 )
비례항의 응답곡선에서 비례 시스템은 오차를 제어하기 어려웠다. 적분항은 시간에 걸친 오차의 합을 말하는데 오차가 클 경우 적분항에 의해 시간이 지나면서 오차의 합이 쌓이며 출력은 빠르게 변해 오차를 제거하게 된다.

비례항을 거쳐 I제어(적분항)을 적용한 그래프

전체적으로 setpoint와의 오차가 줄고 시스템이 좀 더 안정화 되었다.
3) D 제어( 미분항 )
미분항은 오차 변화율을 계산해 그 결과를 출력에 더한다. 오차의 변화가 작으면 미분항의 값이 작다.(출력에 영향을 크게 미치지 않는다.) 그러나 오차가 크면 미분항의 값이 커진다.

적분항을 거쳐 D제어(미분항)을 적용한 그래프

적분항에 있던 오차들은 변화율에 따라 제거해줘서 setpoint와 거의 일치하게됨 시스템이 안정화 수준이다.
'드론' 카테고리의 다른 글
| Roll, Pitch, Yaw 대한 MPU-6050 센서 (0) | 2022.10.05 |
|---|---|
| 드론용 모터와 일반 모터 (0) | 2022.10.05 |
| 호버링 필요한 센서들 (0) | 2022.10.05 |
| 광학위치인식센서(Optical flow sensor) (1) | 2022.10.05 |
| 드론 (시간 함수 - millis() 함수) (0) | 2022.09.08 |



댓글