드론이 Roll, Pitch, Yaw 는 아주 중요한 요소이다. 이 세 가지 조건에 대한 정확한 정보가 없다면, 드론을 제대로 띄을 수 없다.
Roll, Pitch, Yaw 란 ?

전방 기준 배는 좌우로 흔들릴 수 있고 배는 앞뒤로도 흔들릴 수 있다 또 배는 방향을 전환할 수도 있다. 이때 각각을 Roll, Pitch, Yaw 라고 한다. 배의 경우 Yaw가 아주 중요한 요소다. 이러한 현상은 비행기에도 나타난다. 아래 그림 참조

Roll은 비행체의 좌우 기울어짐의 정도, Pitch는 전후 기울어짐 정도 , Yaw는 수평회전 정도이다.
드론의 경우 비행기와 같고 아래 그림은 드론의 Roll, Pitch, Yaw를 나타낸다.

Roll : 드론의 전방 기준 좌우 기울어짐
Pitch : 전후 길어어짐
Yaw : 수평 회전 정도
드론의 Roll, Pitch, Yaw 대한 정보는 MPU-6050 센서를 이용하여 얻어낼 수 있다. [MPU-6050 란?]
MPU-6050 센서는 총 6개의 축을 표시하고 있다. 직선 3축과 곡선 3축 총 6개의 축이 된다. 직선 3축은 기울기 센서가 사용하고, 곡선 3축은 자이로 센서가 사용한다. 직선 3축은 각 축에 대해 중력 방향을 기준으로 센서의 기울어진 정도를 측정할 때 사용한다. 곡선 3축은 각 축 진행 방향에 대한 회전 정도를 측정할 때 사용한다.
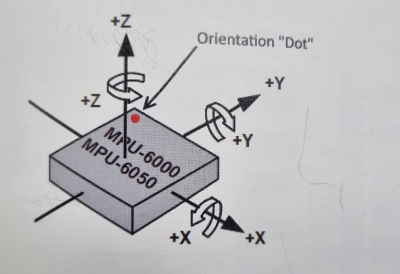
직선 축 진행 방향은 각각 +X , +Y , +Z로 표시한다. 그리고 직선 축 진행 방향의 반대 방향은 각각 -X , -Y , -Z가 된다. 이와 동일하게 곡선 축 진행 방향도 직선 축에 원리와 동일하게 적용된다.
직선 축의 +X , +Y , +Z는 가속도 센서의 + 값이 기준이 된다. 예를 들어 센서가 정적인 상태에서 +X 가 중력 방향을 보게 되면 가속도 센서 X_Accel은 음수 값을 갖는다. 반대로 중력 반대 방향을 보게되면 X_Accel은 양수 값을 갖는다. 직선 축 +Y , +Z 도 마찬가지 방식으로 생각하면 된다.
'드론' 카테고리의 다른 글
| 지글로 니콜스(Ziegler-Nichols)방법으로 드론 PID 튜닝하는 과정 (3) | 2022.10.06 |
|---|---|
| 드론용 모터와 일반 모터 (0) | 2022.10.05 |
| 호버링 필요한 센서들 (0) | 2022.10.05 |
| 광학위치인식센서(Optical flow sensor) (1) | 2022.10.05 |
| PID 개념 (0) | 2022.09.14 |




댓글