지자기 센서

지자기 센서란 멀티 콥터가 지자기 센서 나침판처럼 지구의 자력을 감지하여 멀티 콥터가 어느곳을 향하고 있는지 감지하는 센서이다.

이것을 지자기(Geomagnetic Sensor) 라고 부르는데 크게 홀 이펙트 (Hall Effect) 나 MR (Magnetoresistive Effect, 자기 저항 효과) 효과를 이용하여 만들어진다.
지구 내핵에 있는 물질이 회전해서 생긴것이라고 추측되고 있는 지구 자기장은 우주 방사선으로 부터 지구를 보호해 준다고 한다. 이 자기장은 지구 표면에서 대략 25 ~ 65 uT(Micro tesla) (0.25 ~ 0.65 Gauss) 정도로 측정되고 있다. 나침반이 북쪽을 가리키는 이유는 이러한 지구 자기장에 의한것이다. 그런데 아쉽게도 이 지구 자기장에 의한 북쪽 즉, 자북은 실제 지구 북쪽보다 약 10도 정도 기울어져 있고 지자계 센서는 위에서 언급한 지구자기장을 측정하고 측정된 값에 의하여 자북을 찾아내는 MEMS 센서이다.
출저 : https://brunch.co.kr/@matthewmin/114
지자기 센서의 원리

자기장 속에서 도체에 자기장의 직각방향으로 전류가 흐른다면 자기장과 전류 모두에 직각방향으로 전기장이 나타낸다. 이 전기장을 홀 전기장(Hall field) 하고 하고 Hall field 를 계산하는 방법은 도선을 가로지르는 전위차 (Hall voltage) 를 측정하여 계산할 수 있다. (전위차를 계산 할 수 있다면 그에 따른 자기장의 세기도 알 수 있다.)
지자기 센세는 정확한 동서남북 방향을 알게 해 주는데 송전탑이나 스피커 등 자기장을 발생시키는 구조물에 의한 간섭이 있을 수 있어 드론을 띄울 때마다 컴파스 캘리브레이션 (Compass Calibration)이라 하는 자기보정 절차를 해주는 것이 좋다고 알려져 있다.
출처 : https://ibmhdd.tistory.com/2 [잉여롭게 잉여잉여:티스토리]

가속도 자이로 센서(MPU-6050)
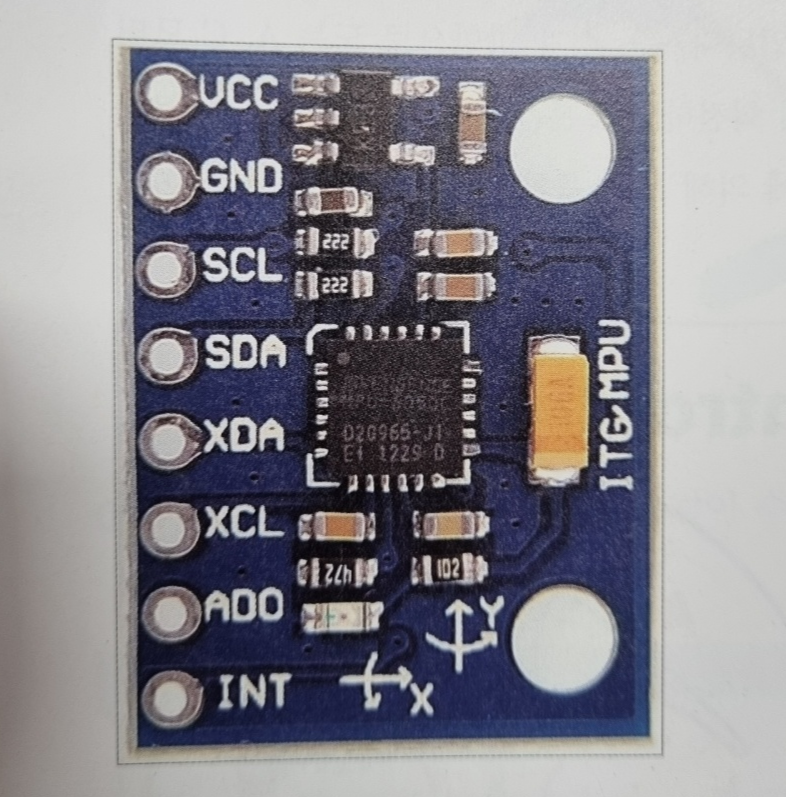
드론의 기울어진 정도와 회전한 정도를 알려준다. MPU6050 모듈은 가속도 3축, 자이로 3축, 온도에 대한 총 7가지 센서 값을 제공 이 센서는 하나의 칩안에 MEMS 가속도 센서 , MEMS 자이로 센서를 가지고 있다. 각 채널에 대해 16비트 크기의 값을 출력해 주는 ADC 모듈을 가지고 있기 때문에 아주 정확하다. 그리고 X, Y, Z 채널 값을 동시에 잡을 수 있다. 아두이노와는 12C 버스 인테페이스를 통해 연결 가능하다.
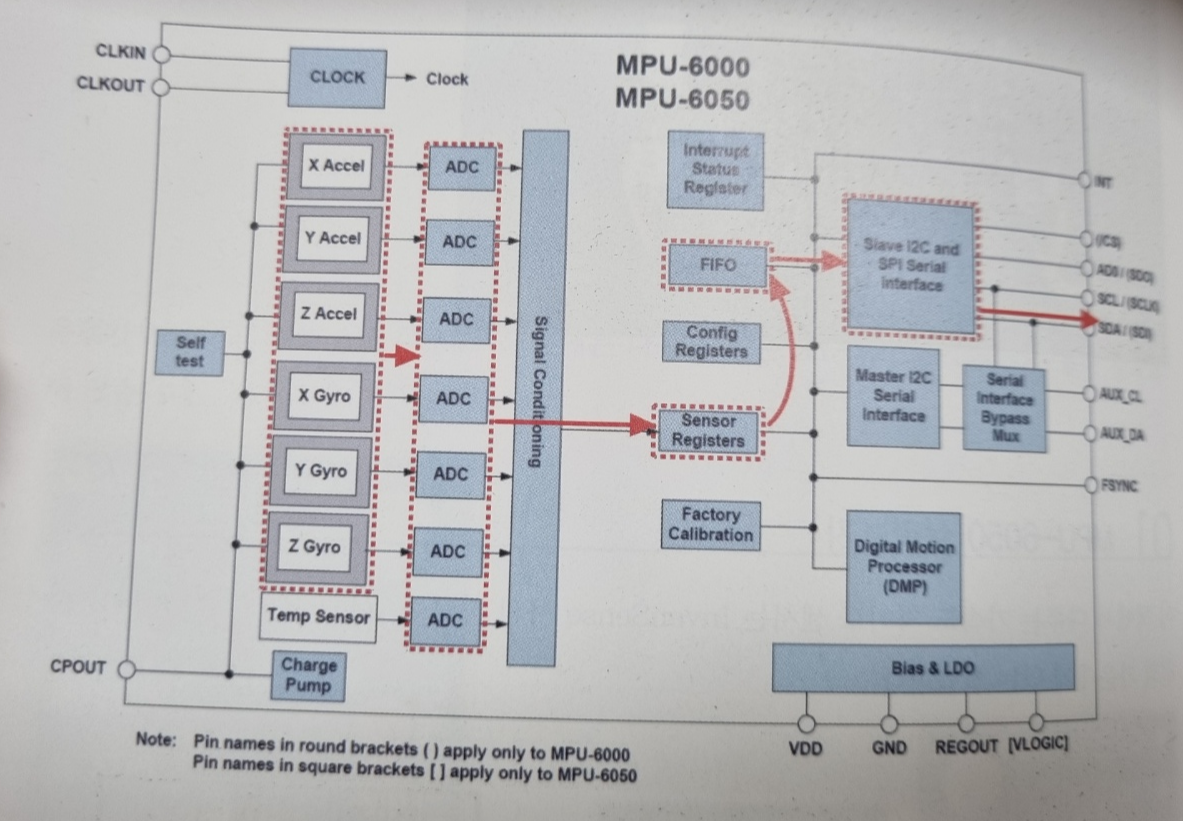
X, Y, Z 축에 대한 가속도와 자이로 값이 각각의 ADC 블록을 거쳐 센서 레지스터에 저장됨 그리고 센서 레지스터에 저장된 값은 12C 통신을 통해 아두이노로 전달됨.
나머지 센서
광학위치인식센서(Optical flow sensor)
옵티컬 플로우의 개념은 1940 년대 미국의 심리학자 제임스 깁슨 (James J. Gibson)이 세계를 움직이는 동물에게 제공되는 시각적 자극을 설명하기 위해 도입되었습니다. 옵티컬 플로우라는 용어는
alswo471.tistory.com
기압계 센서
이륙 후 일정한 높이에 떠 있기 위해서는 중력과 같은 힘으로 추력이 발생하도록 스로틀 값을 맞춰야 하는데, 이때 사용되는 센서가 바로 기압센서 이다.
높이에 따라 기압이 다르다는 것을 이용하면 기압계가 기압을 감지하여 고도를 유지 할 수 있다. 기압값이 높아진다면 기체가 하강하고 있다는 것이니 모터를 가속시키고, 반대로 기압값이 낮아진다면 기체가 상승하고 있다는 것이니 모터를 감속시켜서 일정한 높이에 가만히 떠 있을 수 있도록 해준다.

GPS
인공위성의 신호를 사용하여 드론의 위치 좌표와 고도를 측정한다. 요즘은 일반적인 저가의 아마추어 드론에도 GPS 센서를 장착한다. GPS 신호를 송출하는 인공위성은 미국, 러시아, 유럽, 중국 등에서 군사용 목적으로 띄었으나 현재는 상업용으로 개방하여 대부분의 항공기 및 무인항공기(UAV)들이 사용한다. 물론 우리가 매일 같이 사용하는 스마트폰 지도와 네비도 이 GPS 신호 덕분이다. 그리고 GPS 신호는 드론에서 출발위치를 인식하여 원위치로 돌아오기 기능을 구현하는데도 사용한다.
GPS의 동작 원리는 평면에서 한 점까지의 거리와 측정을 하는 두점 간의 거리를 알면 삼각법으로 계산 할 수 있다. 인공위성은 계속해서 시간 정보를 전파에 실어 지상으로 보내는데 GPS 안테나가 수신하는 시간 정보는 위성에 따라 거리 때문에 약간의 차이가 발생한다. 위성에서 보낸 전파가 GPS에 도달한 시간에 빛의 속도를 곱하면 전파가 이동한 거리 죽 위성과 GPS 수긴기 간의 거리를 측정할 수 있다.

출처 : https://brunch.co.kr/@matthewmin/122
드론의 센서 : GPS
STUDY | 우리 생활을 바꾸면서 전문용어가 일상용어로 변한 단어들이 있는데 그중 하나가 GPS (Global Positioning System)입니다. GPS는 스마트폰에 기본적으로 탑재되어 지도와 내비게이션을 간편하게 사
brunch.co.kr
비전 센서
최신 드론은 비전 센서를 포함하는 경우가 많다. 비디오를 찍고 이미지를 분석하여 장애물의 유무를 판단한다. 인텔의 리얼센스, DJI 팬텀 4에 사용되는 장애물 센서가 대표적이다. 실내에서 10미터 이하의 고도를 측정하거나 호버링 위치를 잡을 때, 장애물을 측정하여 충동을 방지할 때 사용된다. 이미지 패턴을 분석하기 때문에 같은 패턴이 반복되면 호버링 위치를 잡지 못하는 현상이 발생하기도 한다. 장애물 센서의 경우에는 하얀색의 단색으로 된 벽면이나 전깃줄 같이 가는 물체를 인식 못할 수 도 있다.
'드론' 카테고리의 다른 글
| Roll, Pitch, Yaw 대한 MPU-6050 센서 (0) | 2022.10.05 |
|---|---|
| 드론용 모터와 일반 모터 (0) | 2022.10.05 |
| 광학위치인식센서(Optical flow sensor) (1) | 2022.10.05 |
| PID 개념 (0) | 2022.09.14 |
| 드론 (시간 함수 - millis() 함수) (0) | 2022.09.08 |




댓글