 Roll, Pitch, Yaw 대한 MPU-6050 센서
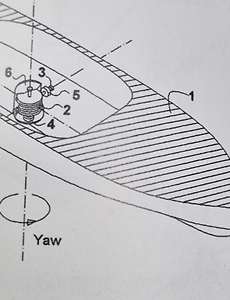
드론이 Roll, Pitch, Yaw 는 아주 중요한 요소이다. 이 세 가지 조건에 대한 정확한 정보가 없다면, 드론을 제대로 띄을 수 없다. Roll, Pitch, Yaw 란 ? 전방 기준 배는 좌우로 흔들릴 수 있고 배는 앞뒤로도 흔들릴 수 있다 또 배는 방향을 전환할 수도 있다. 이때 각각을 Roll, Pitch, Yaw 라고 한다. 배의 경우 Yaw가 아주 중요한 요소다. 이러한 현상은 비행기에도 나타난다. 아래 그림 참조 Roll은 비행체의 좌우 기울어짐의 정도, Pitch는 전후 기울어짐 정도 , Yaw는 수평회전 정도이다. 드론의 경우 비행기와 같고 아래 그림은 드론의 Roll, Pitch, Yaw를 나타낸다. Roll : 드론의 전방 기준 좌우 기울어짐 Pitch : 전후 길어어짐 Yaw ..
2022. 10. 5.
Roll, Pitch, Yaw 대한 MPU-6050 센서
드론이 Roll, Pitch, Yaw 는 아주 중요한 요소이다. 이 세 가지 조건에 대한 정확한 정보가 없다면, 드론을 제대로 띄을 수 없다. Roll, Pitch, Yaw 란 ? 전방 기준 배는 좌우로 흔들릴 수 있고 배는 앞뒤로도 흔들릴 수 있다 또 배는 방향을 전환할 수도 있다. 이때 각각을 Roll, Pitch, Yaw 라고 한다. 배의 경우 Yaw가 아주 중요한 요소다. 이러한 현상은 비행기에도 나타난다. 아래 그림 참조 Roll은 비행체의 좌우 기울어짐의 정도, Pitch는 전후 기울어짐 정도 , Yaw는 수평회전 정도이다. 드론의 경우 비행기와 같고 아래 그림은 드론의 Roll, Pitch, Yaw를 나타낸다. Roll : 드론의 전방 기준 좌우 기울어짐 Pitch : 전후 길어어짐 Yaw ..
2022. 10. 5.

